‘반도체, 우리의 감각을 확장해주는 센서’에 이어 이번에는 센서의 동작원리에 대해서 설명해 보도록 하겠습니다. 1970년대에 자동차 에어백이 개발되어 인명의 피해를 줄일 수 있게 되었습니다. 그 당시에는 차량의 충격을 감지하는 센서에 ‘피에조-전기 소자’를 이용했는데, 이 세라믹 소재의 센서는 압력을 받으면 전기신호가 발생하여 ‘압전(壓電) 소자’라고도 불렸습니다.

▲ <사진 1>압전 소자
사진 출처 : www.ceramtec.kr
그 후 반도체 마이크로 가공 기술이 발전함에 따라 1990년대 말에는 100분의 1mm 두께의 실리콘을 가공해서 마이크로 부품을 만들 수 있게 되었고, 이를 이용해서 전기신호를 만들어 내는 ‘MEMS 디바이스’가 출현했습니다. 그중 하나가 ‘가속도 센서’이지요. 가속도 센서는 가속도, 진동, 충격 등의 동적 힘을 감지합니다. 가속도 센서의 가격이 낮아지게 되자 에어백 센서는 가속도 센서로 대체되었습니다.
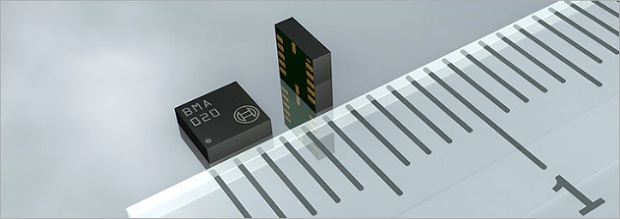
▲ <사진 2>가속도 센서
사진 출처 : Bosch 홈페이지
그럼, 가속도 센서는 어떻게 동작하는 것일까요?
가속도 센서의 동작 원리
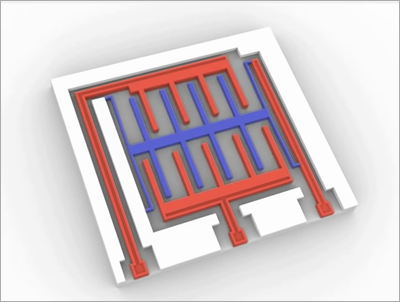
▲ <사진 3>가속도 센서의 구성
사진 출처 : Bosch에서 배포한 동영상에서 캡처
가속도 센서는 그림에서 보는 것처럼 흰색으로 표시된 실리콘 옥사이드 테두리 안에 주황색으로 표시된 빗 모양으로 생긴 캐패시터 2개와 파란색으로 표시된 움직일 수 있는 전극으로 구성되어 있습니다. 전극은 관성에 따라 움직이고 전극의 끝 부분에 스프링이 있어 왕복하게 되지요. 그러면 생선가시처럼 길게 달린 전극과 캐패시터 사이의 거리가 가까워졌다가 멀어졌다 반복하게 됩니다. 이때, 위쪽에 있는 캐패시터에서 발생한 캐패시턴스와 아래쪽에 있는 캐패시터에서 발생한 캐패시턴스 사이에 차이가 발생합니다. 그러면 그 차이를 시그널 프로세서 칩에서 아날로그 신호로 변환시켜 주는 것입니다. 가속도 센서의 원리를 설명하는 동영상을 함께 보실까요?
동영상 <Bosch Working principle of an acceleration sensor>
영상 출처 : 유튜브 (http://www.youtube.com/watch?v=9eSnxebfuxg)
그런데 가속도 센서는 한 가지 단점이 있습니다. 회전운동을 감지하는 능력이 없지요. 관성을 감지하는 것으로는 회전운동을 감지할 수 없기 때문입니다. 회전운동을 감지하기 위해서 항상 반대로 움직이는 전극을 한 벌 더 만들어 두고, ‘코리올리스 효과(Coriolis effect)’에 의한 힘을 감지하도록 고안했습니다. 이것을 ‘자이로 센서’라고 합니다. 이번에는 이 자이로 센서가 어떻게 동작하는지를 살펴보겠습니다.
(연하게) * 코리올리 효과(Coriolis effect) : 전향력 또는 코리올리 힘(Coriolis force)라고도 하며, 회전하는 계에서 느껴지는 관성력으로, 1835년 프랑스의 과학자 코리올리가 처음 설명해 냈다.
자이로 센서의 동작 원리
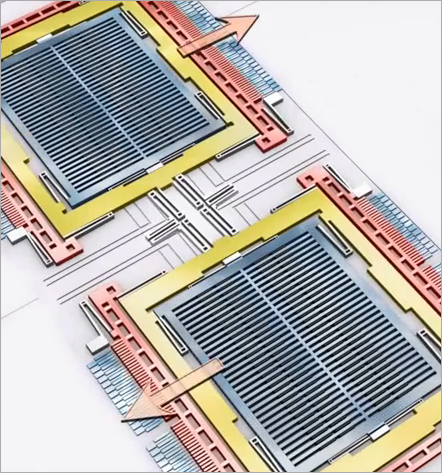
▲ <사진 4>회전 운동이 없는 경우의 모습
사진 출처 : Bosch에서 배포한 동영상에서 캡처
우선 두 개의 전극 가운데는 힌지(접히는 부분)를 두어서 전극이 움직일 때 항상 서로 반대 방향으로 움직이게 만들어 두었습니다. 시그널 프로세서는 각각의 전극이 움직임으로 인해서 생기는 캐패시턴스를 항상 비교합니다. 캐패시턴스에 차이가 없는 경우에는 회전운동이 없고 가속도만 있는 것으로 인지하게 되지요.
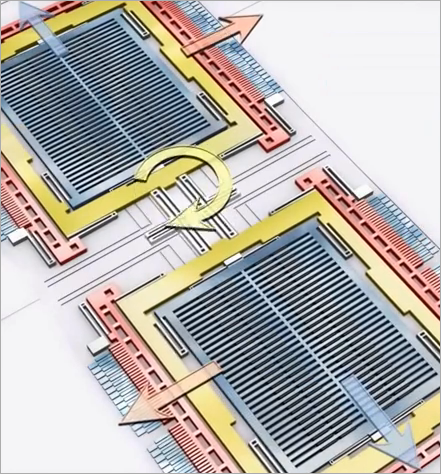
▲ <사진 5>회전 운동이 발생하는 경우의 모습
출처 : Bosch에서 배포한 동영상에서 캡처
회전운동이 발생하는 경우는 전극은 빨간색 방향으로 움직이지만, 파란색 화살표 방향으로도 코리올리스에 의한 힘이 발생하게 됩니다. 회전하는 속도에 비례해서 전극 사이에 캐패시턴스의 차이가 발생하게 되니까 이것을 감지하여 회전을 감지하게 됩니다. 자, 이번에는 자이로 센서의 원리를 설명하는 동영상을 함께 보시겠습니다.
동영상 <Bosch Working principle of a gyroscope for ESP®>
영상 출처 : 유튜브 (http://www.youtube.com/watch?v=XsjvaYAFN1M)
자이로 센서는 회사마다 애플리케이션마다 다르게 설계한다고 합니다. 아이폰에 들어가는 자이로 센서는 이렇게 생겼다고 하네요.
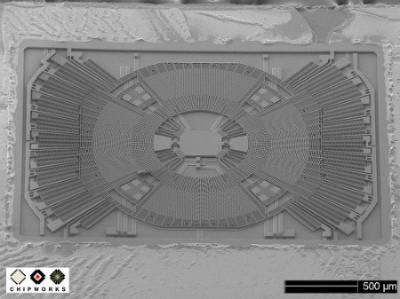
▲ <사진 6>아이폰에 들어가는 자이로 센터
사진 출처 : www.findmems.com 홈페이지
다음은 ‘자력 센서’의 원리를 살펴보도록 하지요.
자력 센서의 동작 원리
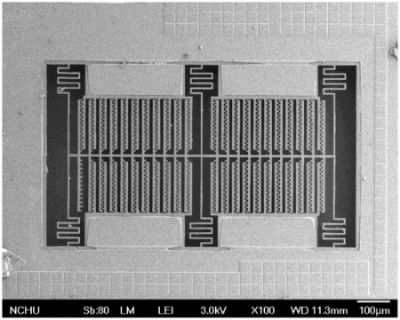
▲ <사진 7>자력 센서의 모습
사진 출처 : www.mdpi.com 홈페이지
자력 센서는 ‘로렌츠 힘(Lorentz force)’을 이용한 것이지요. 아래 그림에서 z 방향에 자력이 있을 때 x 방향의 스프링에 전류를 흐르게 하면 y 방향으로 로렌츠 힘 FB가 생기게 됩니다. 결국, 자력에 의해 발생하는 로렌츠 힘은 전극을 움직이게 하고, 전극의 움직임은 캐패시턴스 C1과 캐패시턴스 C2를 달라지게 합니다. 자력이 세지면 로렌츠 힘도 커지게 되지요.
(연하게) * 로런츠 힘(Lorentz force) : 하전입자가 자기장 속에서 받는 힘을 말한다. 이 힘은 운동하는 전하만 받고, 정자기장에서는 자기장이 전하의 운동 방향에만 영향을 미친다. 이 힘을 표현한 식을 이용하면 임의의 전자기장 내의 힘의 작용 전체를 나타낼 수 있다.
아래는 자력 센서를 확대한 사진입니다.
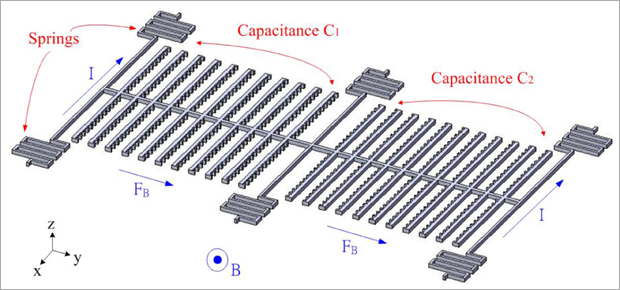
사진 출처 : www.mdpi.com 홈페이지
마지막으로 이번에는 ‘지문인식 센서’의 원리를 알아보겠습니다.
지문인식센서의 동작 원리
접촉했을 때 손가락과 감지전극 사이에 정전용량이 생성됩니다. 지문을 분간할 수 있을 만큼 감지전극을 작게 만들고 바둑판처럼 촘촘하게 배치해 두면, 골과 튀어나온 부분의 거리에 따른 정전용량의 차이를 인식할 수 있습니다. Authetec에서 개발한 ‘지문인식 센서’는 정전용량에 RF 기술을 덧붙여서 지문표면의 각질 아래에 보호된 진피층의 지문을 감지할 수 있게 만들었습니다. 그래서 지문표면이 말라있거나, 닳았거나, 각질이 두껍거나, 기름에 묻었거나 지저분하더라도 지문을 인식할 수 있다고 하네요.
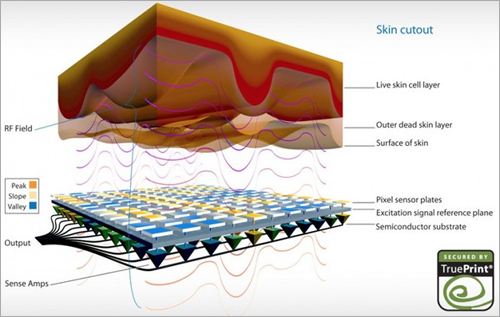
사진 출처 : www.Authetec.com 홈페이지
지금까지 여러 가지 센서의 동작원리를 살펴봤습니다. 센서의 원리를 살펴보니, 자연계에 있는 여러 가지 힘을 잘 이용했다는 것을 알 수 있지요. 이렇게 작은 부속을 만들어 내서 센서를 만들 수 있다니 참으로 놀랍습니다. 우리 회사에서도 이런 센서를 어셈블리하고 있는 것이지요.
위에 설명한 센서 외에도 많은 센서가 있습니다. 마이크로폰, 적외선 센서, 라이트 센서, 압력 센서, 온도 및 습도 센서, 근접 센서, 터치 센서, 기압 센서, 이미지 센서, GPS 센서, 자외선 센서, 유량계 센서, 초음파 센서, PH 센서, 등등은 스마트폰과 ‘사물인터넷(Internet of Things, IoT)’의 기능을 높이고 우리의 생활을 스마트하게 만들 것입니다.